-
-6 26
(1)单臂双爪式机械手单臂双爪式机械手,也叫扁担式机械手,它是目前数控冲床加工中心上用的较多的一种。这种机械手的拔刀、插刀动作,大都由液压缸来完成。根据结构要求,可以采取液压缸动,活塞固定;或活塞动,液压缸固定的结构形式。而手臂的回转动作,则通过活塞的运动带动齿条齿轮传动来实现。机械手臂的不同回转角度,是由话塞的可调行程来保证。其结构可参见JCS-018机床的机械手。手爪伸缩式可参见SOLON3-1加工中心的机械手。
这种数控冲床机械手采用了液压装置,既要保持不漏油,又要保证机械手动作灵活。而且每个动作结束之前均必须设置缓冲机构,以保证机械手的工作平稳、可靠。由于液压驱动的机械手需要严格的密封,还需较复杂的缓冲机构;控制机械手动作的电磁阀都有一定的时间常数,因换刀速度慢。近年来国内外先后研制出凸轮联动式单臂双爪机械手。其工作原理如图7 93所示。
这种机械手的优点是:由电动机驱动,不需较复杂的液压系统及其密封、缓冲机构,没有漏油现象,结构简单,工作可靠。同时,机械手手臂的回转和插刀、拔刀的分解动作是联动的,部分时间可重叠,从而大大缩短了换刀时间。
(2)双臂单爪交叉型机械手由北京机床所开发和生产的JCS013卧式加工中心,所用换刀机械手就是双臂单爪交叉型机械手,如图7-94所示。
这种机械手的自动换刀过程,如图7 95所示。
(3)单臂双爪且手臂回转轴与主轴成45。的机械手机械手结构如图7-96所示。
这种机械手换刀动作可靠,换刀时间短。缺点是刀柄精度要求高,结构复杂,联机调整的相关精度要求高,机械手离加工区较近。
3.手爪形式
(1)单臂双爪式机械手的手爪单臂双爪式机械手的手爪,较普遍采用的机械锁刀方式手爪——弹簧销式手爪。见加工中心部分。
钳形手的杠杆手爪,如图7-97所示。图中的锁销2在弹簧(图中末画出此弹簧)作用下,其大直径外圆顶着止退销3,杠杆手爪6就不能摆动张开,手中的刀具就不会被甩出:当抓刀和换刀时,锁销2被装在刀库和主轴端部的撞块压回,止退销3和杠杆手爪6就能够摆动,放开,刀具9能装入和取出。这种手爪均为直线运动抓刀。
(2)刀库夹爪刀库夹爪既起着刀套的作用,又起着手爪的作用,图7-98所示为刀库夹爪图。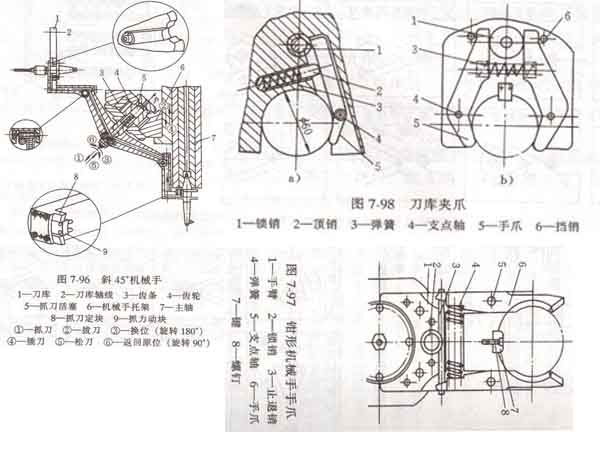
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。
- 评论(0)
发表评论 TrackBack