
限位控制是数控冲床的一个基本安全功能。数控冲床的限位分为硬限位、软限位和加工区域限制。硬限位是数控冲床的外部安全措施,硬限位的目的是在数控冲床失控出现硬件超程的情况下断开驱动器的便能控制信号。由于硬限位信号的触发对于数控系统来说是随机的,因此硬限位生效后坐标轴制动所需的距离与硬限位发生之前坐标轴的速度有关(硬限位的制动特性如图1-12所示),硬限位触发时的速度越高,制动距离越长。数控系统要求硬限位行程开关的碰块必须具有足够的长度,更确切地说是碰块的长度必须大于减速所需的距离。通常在数控系统的软限位生效之前应该限制坐标轴的速度。
软限位是数控系统的内部安全功能。软限位的基准位置是机床坐标系的原点,在机床坐标系生效之前软限位是不会生效的。软限位的设置须在机床返回参考点后才能生效。一旦软限位生效,不论是手动操作进给轴运行,还是自动运行加工程序,数控系统都将实时监控各个进给轴的速度和位置,以确保坐标轴能够在设定的软限位位置上停止(软限位的制动特性如图1-13所示)。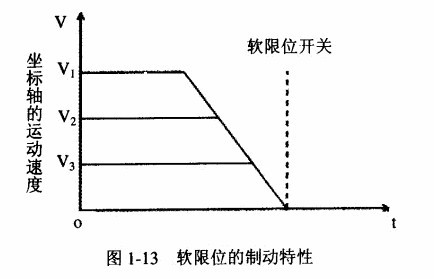
另外一种常用的硬限位连接方式称为超程链。这种连接方式的特点是将急停按钮和硬限位开关的常闭触点串接在一起去控制24V继电器,并且不论是急停控制还是硬限位控制,都不需要通过PLC程序去激活数控系统的紧急处理功能,而是利用24V继电器的触点直接断开伺服驱动器的控制便能。如图1-11所示是超程链的一种连接参考圈,从圈中可以看出,在没有急停,也没有任何硬限位时, 24V继电器KAI的控制线圈上将获得有效电平, KAI的常开触点闭合,使驱动器控制便能端子64与端子9接通。当急停或任意轴的硬限位发生时,继电器KAI的控制线圈失电。使得KAI的常开触点复位断开,从而切断伺服驱动器的控制使能(端子64与端子的连接9断开)。采用超程链方案处理急停和硬限位时,如果不需要PLC的任何控制,操作人员将无法判断故障的真正原因是因为急停还是因为哪个轴的哪个方向出现硬限位引起的。因此在采用超程链设计原则时,应考虑如何为机床操作人员提供准确的诊断信息,并且需要处理由于超程链方案导致的边界条件。
按照超程链的设计原则,急停或硬限位时只需断开驱动器的控制使能。对于操作人员来说,当驱动器的控制便能失效导致机床不能继续工作时,一定是急停或者是某个轴的某个方向出现了硬限位,但是无法确定控制使能失效的真正原因。因此可以将急停和硬限位的信号全部输入到PLC,由PLC系统应用程序分析井产生正确的报警信息,因此在超程链的连接图中需要将急停信号及各硬限位信号送如PLC输入模块PP72148。以图1-11所示的超程链为例,将急停与各进给轴限位可能出现的各种情况列于表1-5中。可以看出,急停和各轴的限位都有明确表示。如果将表1-5的内容集成到PLC应用程序中,就可以准确地提供诊断信息。当然还可以采用在每个轴的两个方向上各设行程开关,这种情况下可设计同样的编码表格用来确定正确的诊断信息。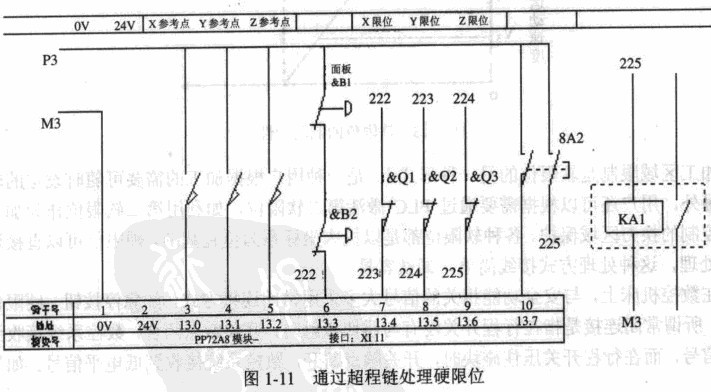
使用超程链需要考虑各种边界条件。这些边界条件可能对机床的操作产生影响,甚至导致机械故障。可能出现的边界条件之一是,在超程链解除时必须保证坐标铀不会超过某个方向上的机械极限。在出现硬限位时,操作人员需要移动坐标轴退开硬限位碰块。由于超程链在硬限位出现时自动断开了驱动器的伺服使能,所以需要通过超程链解除接通驱动器的使能,然后用手动方式移动坐标离开硬限位碰块。假如因操作失误坐标轴继续向硬限位的方向移动,就可能超过机械极限。因此必须设计PLC的互锁逻辑,使得在退出硬限位碰块时,只能向相反方向移动坐标轴。边界条件之二是,假如在出现硬限位时数控冲床断电,由于再次上电后,数控信号接口轴的运动方向信息丢失,无法互锁坐标轴的移动方向。解决方案是利用可保持寄存器来记忆硬限位发生时的方向信息,这样才能保证按照正确的方向退出硬限位。
